



















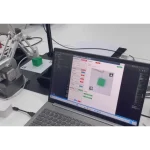


UltraArm P340 Brazo Robótico de Escritorio
UltraArm P340 Brazo Robótico de Escritorio es un pequeño brazo robótico de colaboración de alto rendimiento que ocupa sólo una superficie de papel A5, y está basado en Ubuntu 20.04 y ROS2 FOX y se beneficia del código abierto completo de la placa de desarrollo Arduino y del procesador AVR ATMEGA2560-16AU de 8 bits de alto rendimiento. Está diseñado para satisfacer las necesidades educativas, pero se utiliza igualmente para la investigación y la creación de interés personal. Es robusto, compacto y resistente, ya que utiliza una construcción de aleación de aluminio para aumentar la rigidez y sus capacidades de carga útil. Tiene una carga útil de 650 g y un radio de trabajo de 340 mm. Incorpora motores paso a paso de alto rendimiento, que mejoran su velocidad, proporcionan mayor estabilidad y una precisión de posicionamiento repetible de ±0,1 mm. Puede conseguir un dibujo y una escritura precisos o un grabado por láser y puede combinarse libremente con diversos efectores finales, como carril de deslizamiento, cinta transportadora, myAGV y cámaras, garras, ventosas, etc. Con la interfaz de grabado láser, puede utilizar el ultraArm P340 para grabar en madera, papel, cuero y otros materiales. Con la interfaz de garra adaptable, puede utilizarlo para recoger y colocar objetos. Con la interfaz de ventosa, puede utilizarlo para recoger y colocar objetos con superficies lisas. El ultraArm P340 es un brazo robótico colaborativo compacto y robusto de alto rendimiento que además es asequible en comparación con otros brazos robóticos.
El precio original era: 1,000.00 €.890.00 €El precio actual es: 890.00 €. IVA Inc.
10 En stock.
UltraArm P340 4 Axis Robotic Arm – Specifications:
- Model: ultraArm P340
- Working time: 7/24
- DOF: 3-4
- Payload: 650g
- Repeatability: 340mm
- Positioning Accuracy: ±0.1mm
- Weight: 2.9kg
- Working Lifespan: 5000h
- Input power: 12V 5A
- Joint rotation range : J1 -150° ~ +170° / J2 -20° ~ 90° / J3 -5° ~ 75°
- Noise : 60 dB
- Maximum terminal velocity: 100mm/s
- Power supply adapter: 100-240V AC 50-60Hz
- Base port: Laser engraving interface adaptive gripper interface suction pump interface burning switch
- Velocity of joint: J1 100°/S – J2 100°/S – J3 100°/S
- Installation Mode: Horizontal Desktop Installation
- Power module: High performance stepper motor
- Method of programming: Elephant Ruban,Graphical programming myBlockly,Python
- Operating temperature: 0°~45°
- Working environment humidity: 5%-80%
- Main programming languages supported: Python, C++, Arduino, etc.
- Full OS development supported: Windows, Mac OSX, Linux.
- High-performance stepper motor x 3
- Convenient electrical interface x 3 (for laser engraving, adaptive gripper and suction pump)
- Burning switch
- myBlockly – drag-and-drop programming visualization software
- Elephant Luban – platform that generates the G-Code track ( multiple functions including precise writing and drawing, laser engraving, etc.)
- myStudio (various functions and tutorials for users, such as installation of robotic driver, robotic firmware updating, user mannul, video tutorials, etc.)
- ROS1 & ROS2 simulation control supported
- Practical science courses
- Drawing
- Laser engraving
- Vision & Picking
- Open source platform
- Vision education kit: ROS1 & ROS2, OpenCV, Python, Palletizing robot control principle, Use of end-effector, AI machine vision, Smart factory knowledge, Automatic sorting, Dynamic vision identification
| Peso | 2.9 kg |
|---|---|
| Dimensiones | 21 × 14 × 27 cm |
| Payload |
650 gramos |
Debes acceder para publicar una valoración.
-
 Facturación libre de impuestos para profesionales europeos si el número de IVA es válido.
Facturación libre de impuestos para profesionales europeos si el número de IVA es válido.
-
Entrega en 7-10 días para productos en stock y 3-4 semanas para productos fuera de stock. Envío gratuito para pedidos superiores a 60 euros (excepto vehículos inteligentes y productos pesados). Almacenes en España, Alemania, Polonia, Francia, Hungría y Grecia.
-
Reembolsaremos o cambiaremos cualquier producto defectuoso, dañado durante el transporte o no conforme. Tiene derecho a cancelar este contrato dentro de los 14 días sin dar ningún motivo. El plazo de cancelación vencerá a los 14 días desde el día en que usted adquiera, o un tercero distinto del transportista e indicado por usted adquiera, la posesión física del último bien. Para ejercer el derecho de cancelación, debe informarnos [NTS Systems and Trade LTD, Rakovski 157, 1000, Sofia, admin@newtechstore.eu, +35 92 49 31064) de su decisión de cancelar este contrato mediante una declaración clara (por ejemplo, un carta enviada por correo, fax o correo electrónico). Puede utilizar el modelo de formulario de cancelación adjunto, pero no es obligatorio. Para cumplir con el plazo de cancelación, es suficiente que envíe su comunicación sobre el ejercicio del derecho de cancelación antes de que expire el período de cancelación.
Productos relacionados

DEALDIG Robvacuum 8 Robot de limpieza al vacío inteligente con conexión WiFi
Agotado
Makeblock Robot Educativo Programable con Bluetooth
En stock
Q2 Juego Educativo Robot con Sensor Táctil y Sonido
Agotado

R2 Robot Inteligente de Control Remoto con Sensor de gestos
En stock

Robot Científico y Educativo 10 en 1 con Motor Eléctrico de 6 V
Agotado

Robot Espacial Electrónico Inteligente Caminando y Bailando
Agotado

Robot Inteligente Star Wars RC BB8 con Interacción de Audio y Control Remoto 2.4G
Agotado
S60 Robot Limpiador de Vidrio con Control Remoto
En stock

Valoraciones
No hay valoraciones aún.